Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


What if robots could work together like ants to move objects, clear blockages, and guide living creatures? Discover more!

Scientists at Hanyang University in Seoul, South Korea, have developed small magnetic robots that work together in swarms to perform complex tasks, such as moving and lifting objects much more significant than themselves. These microrobot swarms, controlled by a rotating magnetic field, can be used in challenging environments, offering solutions for tasks like minimally invasive treatments for clogged arteries and guiding small organisms.
The researchers tested how microrobot swarms with different configurations performed various tasks. They discovered that swarms with a high aspect ratio could climb obstacles five times higher than a single robot’s body length and throw themselves over them. In another demonstration, a swarm of 1,000 microrobots formed a raft on water, surrounding a pill 2,000 times heavier than a single robot, allowing the swarm to transport the drug through the liquid. On land, a swarm moved cargo 350 times heavier than each robot, while another swarm unclogged tubes resembling blocked blood vessels. Using spinning and orbital dragging motions, the team also developed a system where robot swarms could guide the movements of small organisms.

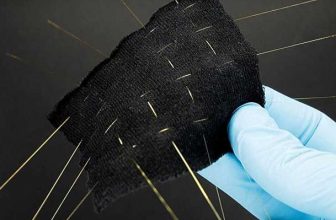
The researchers designed cube-shaped microrobots that feature larger surface areas, resulting in stronger magnetic attraction between them. Each microrobot is 600 micrometres tall and made of epoxy embedded with ferromagnetic neodymium-iron-boron (NdFeB) particles, allowing it to respond to magnetic fields. The swarm can self-assemble by rotating two connected magnets, with the robots programmed to form different configurations by adjusting the angle at which they are magnetized.
Inspired by the behaviour of ants, the researchers aim to harness the power of swarming to create robots that are more resilient to failure. Even if some robots fail to perform a task, the rest of the swarm continues to operate, ensuring overall success.
Reference: Kijun Yang, Sukyoung Won, Jeong Eun Park, Jisoo Jeon, Jeong Jae Wie. Magnetic swarm intelligence of mass-produced, programmable microrobot assemblies for versatile task execution. Device, 2024; 100626 DOI: 10.1016/j.device.2024.100626

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)