Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


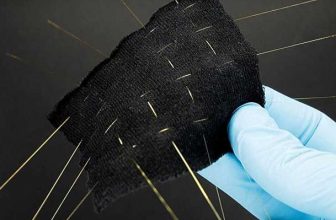
What if robots could build their own bodies as needed? Researchers developed a system where robots spin polymer fibers to form tools, bridges, and structures on demand.

Researchers at the Institute of Technology, University of Tartu, have introduced a robotics concept where robots form temporary structures and movement paths by spinning a polymer solution on-site. They demonstrate this with an ad hoc gripper for handling delicate objects and a bridge for crossing debris and uneven terrain.
Unlike large language models that can adapt their responses but remain physically fixed, most robots are either designed for specific tasks or follow a rigid, one-size-fits-all approach. This research explores a different possibility—robots that build the structures they need in real time. By extruding a heated polymer solution that solidifies into fine fibers, these robots can shape their bodies on demand, merging with their surroundings and moving beyond the limitations of conventional designs.

In a series of tests, the team demonstrated the robot’s adaptability. In one experiment, it spun a flexible fiber network across a debris field, forming a bridge that worked equally well over razor-sharp glass or soft bird feathers. In another, it created a fibrous “limb” to carefully retrieve a fragile flower, showing dexterity beyond predesigned robotic forms.
The spun webs adhered and anchored to nearly any surface, regardless of shape, material, or texture. Like spiderwebs, they used both physical adhesion and mechanical entanglement to stay in place.
In experiments, the web securely anchored to difficult surfaces, including Teflon, an oil-soaked sponge, and a waxy plant leaf. By harnessing the self-assembling properties of polymer fibers—similar to the kiting silk spiders used in nature—the team has created a system that builds itself in response to unpredictable environments. This expands the possibilities for robotics in disaster relief and redefines how machines interact with their surroundings.
Rather than simply adapting to environments, these robots actively reshape them. From search-and-rescue missions to adaptive construction, the technology challenges conventional industrial thinking. Instead of designing rigid systems that force the environment to conform, this approach allows machines to grow and evolve in real time.
This research advances the fusion of biological inspiration and robotics, paving the way for machines that are not just static tools but dynamic systems capable of reshaping both their function and form.
Reference: Marie Vihmar et al, Silk-inspired in situ web spinning for situated robots, npj Robotics (2025). DOI: 10.1038/s44182-025-00019-2

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)