Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


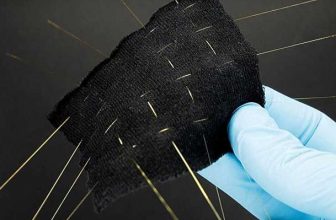
The soft robot moves through debris to help rescuers find paths in collapsed buildings. It can also be used to check military equipment and buildings.

MIT Lincoln Laboratory and University of Notre Dame researchers have developed the Soft Pathfinding Robotic Observation Unit (SPROUT). SPROUT is a vine-like soft robot that extends and navigates through tight spaces and around obstacles. First responders can deploy it under collapsed structures to explore, map, and identify the best entry routes through debris.
First responders use technology like cameras and sensors to assess complex environments, but these tools have limitations. Search-and-rescue cameras can only move in straight lines inside collapsed structures, requiring teams to cut access holes to extend their reach. Robots can explore rubble piles but struggle in tight, unstable spaces and are expensive to repair if damaged. SPROUT addresses this challenge by providing a low-cost, easy-to-use robot to navigate winding paths under debris while carrying cameras and sensors.

SPROUT consists of an inflatable tube made of airtight fabric that extends from a fixed base. A motor controls its deployment as air inflates the tube, allowing it to bend around corners and pass through narrow spaces. A camera and sensors at the tip capture images and map the surroundings. Operators steer SPROUT using joysticks while monitoring its camera feed on a screen. Currently, SPROUT can extend up to 10 feet, with plans to increase its reach to 25 feet.
Developing SPROUT required solving challenges related to its flexibility. Since the robot bends at multiple points, controlling its shape as it expands is complex—similar to managing an extending, flexible tube; ensuring that steering was intuitive, allowing operators to move SPROUT simply by pointing the joystick forward, was key for adoption by emergency responders. The team also designed the tube to minimize friction and refined the control system for smooth navigation.
Hanson says that sensing in tight spaces extends beyond disaster response, with potential applications in military system maintenance and critical infrastructure inspections. Initially designed for mapping void spaces, the technology’s future development aims to detect hazards and evaluate operational safety in debris-filled environments.

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)