Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


Scientists at the University of Tokyo and Waseda University have built a biohybrid hand that moves, grasps objects, and makes gestures. Read on!
Researchers from the University of Tokyo and Waseda University in Japan have developed a biohybrid hand that can grasp objects and make a scissor gesture. They achieved this by using thin strands of lab-grown muscle tissue, bundled together like sushi rolls, to give the fingers enough strength to move.
These muscle-based actuators, called MuMuTAs, are an important step toward creating larger biohybrid limbs. While still in the lab stage, MuMuTAs could help improve future prosthetics, support drug testing on muscle tissue, and expand the capabilities of biohybrid robots to mimic natural movement.

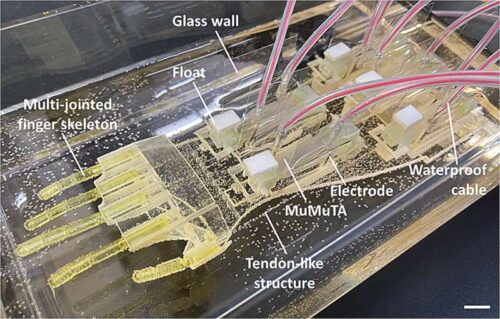
The hand has a 3D-printed plastic base with tendons made of human muscle tissue that control finger movement. Earlier biohybrid devices were much smaller, around 1 cm long, or could only perform simple, single-joint motions. In contrast, this biohybrid hand is 18 cm long and has multijointed fingers that can move independently for gestures or together to grasp objects.
Growing thick muscle tissue for larger limbs is challenging because it can suffer from necrosis, where the center of the muscle doesn’t get enough nutrients and starts to break down. To overcome this, the team bundled multiple thin muscle tissues together, allowing them to function as a stronger tendon.
To test the hand, the team made it perform a scissor gesture by contracting the little finger, ring finger, and thumb. They also used the fingers to grasp and move the tip of a pipette. This showed that the hand could perform both individual and combined finger movements, demonstrating its flexibility.
Right now, the hand needs to stay in liquid so that the muscle “anchors,” or ties, can float without friction, allowing smooth finger movement. However, the team believes that with further improvements, a free-moving hand will be possible.
Another challenge is that the fingers don’t actively return to their starting position but instead drift back on their own. Adding an elastic material to pull them back or placing additional MuMuTAs on the back of the fingers to contract in the opposite direction could provide better control.
Resources: XINZHU REN et al, Biohybrid hand actuated by multiple human muscle tissues, Science Robotics (2025). DOI: 10.1126/scirobotics.adr5512. www.science.org/doi/10.1126/scirobotics.adr5512

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)