Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


MIT Engineers have built an insect-sized jumping robot that can cross tough terrain and carry heavy loads.
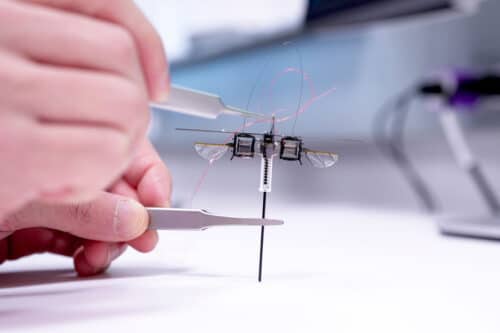
Tiny insect-sized robots can reach tight spots, like deep in collapsed buildings, but struggle with tall or slanted obstacles. Flying robots avoid this but use too much energy and can’t go far. To solve this, MIT researchers developed a tiny hopping robot that uses much less energy than flying robots but can still jump over obstacles and uneven terrain. It’s smaller than a thumb, lighter than a paperclip, and uses a springy leg to hop, with four flapping wings that provide lift and balance.
The robot can jump about 20 centimeters—four times its height—and move sideways at 30 centimeters per second. It handles ice, wet surfaces, uneven ground, and can even land on a hovering drone, all while using 60% less energy than a flying robot. Thanks to its light, durable build and efficient movement, it can carry up to 10 times more payload than a flying robot of similar size, opening the door to many new uses.

The MIT robot uses a compression spring, like the one in a click pen, to bounce. Its four flapping wings, powered by soft, impact-resistant actuators, help it stay upright and guide its jumps.A fast control system steers the robot. It uses motion tracking and a control algorithm to position the robot for each jump. As it arcs through the air, the robot estimates where it will land and adjusts its wings to hit the ground at the right angle and direction, setting it up for the next hop.
Researchers tested the robot on grass, ice, wet glass, uneven soil, and even a tilting platform. It adapted to all surfaces, with the controller adjusting wing power to maintain jump performance—for example, boosting thrust on grass to overcome damping from the blades. Its low weight gives it a small moment of inertia, making it agile and resistant to impacts.
The team demonstrated flips and showed the robot can hop onto a flying drone without damage—ideal for cooperative tasks. It carried twice its weight without losing performance, and the limit may be much higher, depending on the spring, not the payload. Next, the researchers plan to add batteries, sensors, and circuits to make it fully autonomous and ready for use outside the lab.

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)