Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


What if drones and robots could navigate crowded environments safely without complex path planning? Learn how a new method scales from a few agents to thousands.

MIT engineers have developed a training method for multiagent systems that ensures safe operation in crowded environments. The learned safety margins and controls can automatically scale to larger groups by training a few agents, maintaining overall system safety. In real-world tests, palm-sized drones successfully switched positions midflight and landed on moving vehicles. Simulations confirmed that the same training, applied to a few drones, could be extended to thousands, enabling large-scale coordinated operations while ensuring safety.
Mall margins
The MIT team has developed a method to train a few agents to manoeuvre safely in a way that efficiently scales to larger systems. Instead of planning specific paths for each agent, the method enables them to continuously map their safety margins—boundaries that define safe operation. Agents can then take various paths to complete tasks as long as they remain within these margins. The researchers compare this approach to how humans intuitively navigate their surroundings.
– Advertisement –
Safety barrier
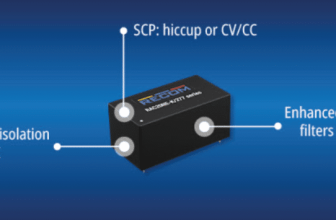
In their study, the MIT team has introduced GCBF+ (Graph Control Barrier Function), a method for ensuring safe navigation in multiagent systems. A barrier function defines a safety boundary beyond which an agent risks becoming unsafe, and this boundary changes dynamically as agents move and interact. Traditional approaches require calculating safety zones for every agent relative to all others, which can be computationally complex. GCBF+ simplifies this by computing safety zones for only a small subset of agents, accurately representing the behaviour of a larger system. The method considers an agent’s sensing radius—how much of its surroundings it can observe—and uses simulations to develop a controller that guides agents while maintaining safety.
The team tested GCBF+ using eight Crazyflies, small quadrotor drones, which successfully adjusted their real-time paths to switch positions midair without collisions. The drones avoided each other by continuously mapping their safety zones and making necessary course corrections. In another test, the drones were tasked with landing on moving Turtlebots, wheeled robots driving in a circle. Despite continuous motion, the Crazyflies coordinated their landings while avoiding collisions, demonstrating the method’s effectiveness in dynamic environments.

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)