Check out our latest products

![[5G & 2.4G] Indoor/Outdoor Security Camera for Home, Baby/Elder/Dog/Pet Camera with Phone App, Wi-Fi Camera w/Spotlight, Color Night Vision, 2-Way Audio, 24/7, SD/Cloud Storage, Work w/Alexa, 2Pack](https://m.media-amazon.com/images/I/71gzKbvCrrL._AC_SL1500_.jpg)


As UAVs become integral to smart cities and infrastructure inspection, this research paves the way for safer, more effective operations in GPS-denied environments.
Navigating Unmanned Aerial Vehicles (UAVs) without reliable Global Positioning System (GPS) signals remains a critical challenge in modern aerospace technology. A recent study from Prince Sultan University, delves into methods for improving UAV localization in environments where GPS signals are weak or unavailable, such as urban canyons or disaster zones. The research emphasizes the potential of vision-based systems and hybrid approaches combining various sensors and algorithms for more reliable, real-time navigation.
GPS, a crucial component of UAV navigation, often fails in areas with obstructed or jammed signals. While alternatives like inertial sensors and LiDAR have shown promise, they often suffer from issues like drift and high computational costs. The study explores hybrid systems that fuse data from multiple sensors—such as LiDAR, radar, and inertial measurement units (IMUs)—to create more reliable navigation solutions.

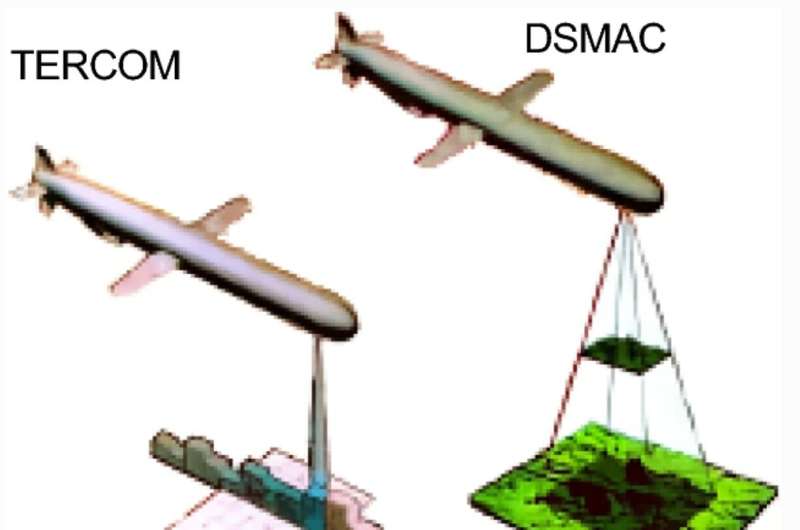
The review analyzes over 130 research papers, focusing on two main approaches for UAV navigation: absolute localization, which relies on pre-mapped terrain data, and relative localization, which uses real-time sensor data, like SLAM (Simultaneous Localization and Mapping) and visual-inertial odometry. While absolute methods work well in known environments, they struggle in featureless or rapidly changing areas. On the other hand, relative methods offer flexibility but demand significant computational power.
Vision-based systems, particularly those enhanced by AI for feature recognition, are gaining traction, though challenges such as lighting conditions persist. The study highlights the importance of multi-sensor fusion, demonstrating how combining data from various sensors and applying advanced filtering techniques, like Kalman filters, can improve navigation accuracy. Real-time processing—enabled by hardware accelerators like GPUs—plays a crucial role in achieving faster, more efficient decision-making.
Lead author Dr. Imen Jarraya noted that no single sensor or algorithm can fully address the challenges of GPS-denied navigation. The research underscores the need for further optimization of hybrid systems to handle the unpredictability of environments ranging from dense urban areas to remote disaster zones.
The findings have significant implications for industries such as logistics, agriculture, and defense. UAVs could deliver supplies to disaster-stricken areas without GPS, or military drones could operate in signal-jammed regions.

![[3 Pack] Sport Bands Compatible with Fitbit Charge 5 Bands Women Men, Adjustable Soft Silicone Charge 5 Wristband Strap for Fitbit Charge 5, Large](https://m.media-amazon.com/images/I/61Tqj4Sz2rL._AC_SL1500_.jpg)